前言
計(jì)算機(jī)視覺的廣闊領(lǐng)域中,OpenCV無(wú)疑是一顆璀璨的明星,它為開發(fā)提供了豐富且強(qiáng)大的圖像處理和計(jì)算機(jī)視覺算法庫(kù)。而OpenCvSharp作為OpenCV的.NET封裝,讓C#開發(fā)能夠更加便捷地在.NET環(huán)境中運(yùn)用OpenCV的強(qiáng)大功能。然而,對(duì)于初學(xué)者而言,直接上手使用OpenCvSharp進(jìn)行項(xiàng)目開發(fā)可能會(huì)面臨諸多困難,比如對(duì)函數(shù)參數(shù)的理解不透徹、不知道如何將算法應(yīng)用到實(shí)際場(chǎng)景中等。
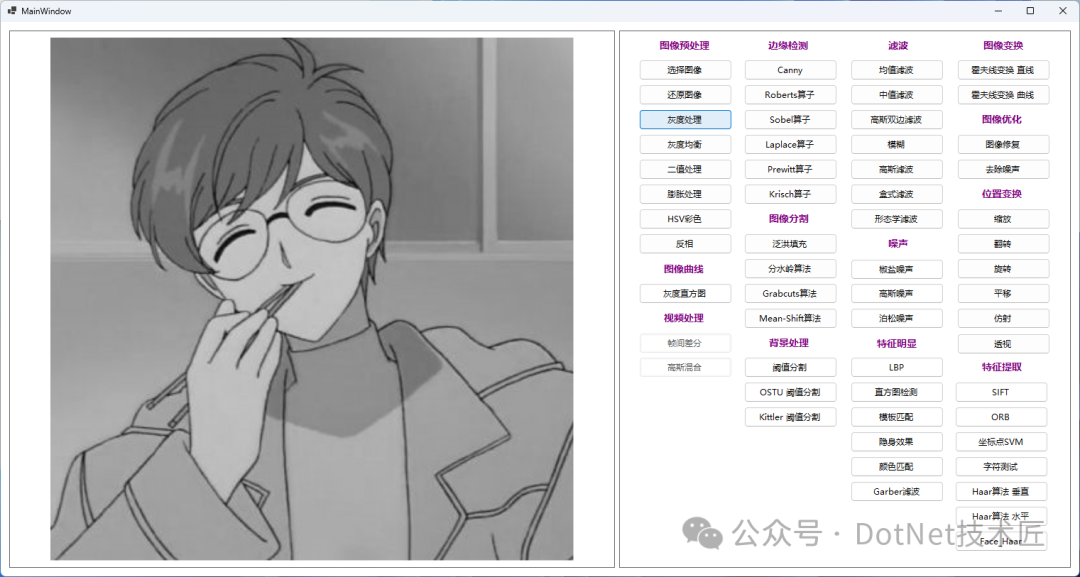
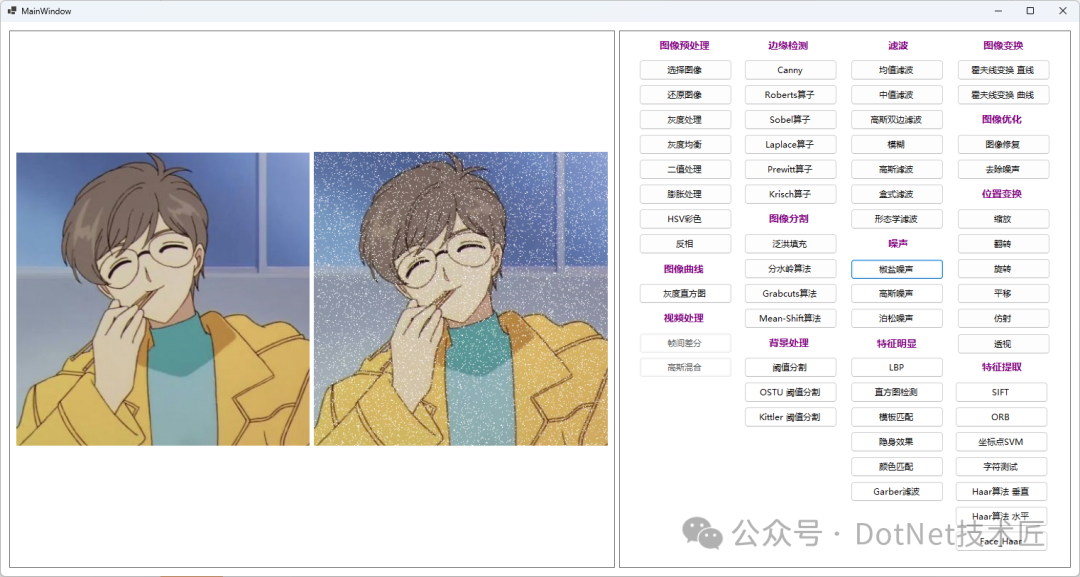
為了幫助大家更好地學(xué)習(xí)和掌握OpenCvSharp,一個(gè)圖形化界面(GUI)的學(xué)習(xí)工具就顯得尤為重要。GUI4OpenCV為大家提供一個(gè)直觀、便捷的平臺(tái),通過(guò)一系列示例展示OpenCvSharp的常見用法,助力大家快速入門。
項(xiàng)目介紹
GUI4OpenCV是一個(gè)在幫助開發(fā)快速上手并掌握OpenCvSharp基本用法的開源項(xiàng)目。該項(xiàng)目通過(guò)一系列實(shí)用的示例代碼,展示了如何進(jìn)行常見的圖像處理任務(wù),如邊緣檢測(cè)、顏色空間轉(zhuǎn)換等。每個(gè)示例都設(shè)計(jì)得盡可能簡(jiǎn)潔明了,便于大家理解核心概念的同時(shí),也為大家提供一種快速參考的方式。
項(xiàng)目功能
1、邊緣檢測(cè):展示如何使用Canny算法對(duì)圖像進(jìn)行邊緣檢測(cè)。
2、顏色空間轉(zhuǎn)換:演示RGB到灰度圖以及HSV顏色空間的轉(zhuǎn)換方法。
3、圖像濾波:包括高斯模糊、均值濾波等常見濾波器的應(yīng)用。
4、形態(tài)學(xué)操作:介紹膨脹、腐蝕等形態(tài)學(xué)變換的基本原理及其實(shí)現(xiàn)。
5、特征點(diǎn)檢測(cè):如SIFT、SURF等算法的簡(jiǎn)單實(shí)現(xiàn),用于識(shí)別圖像中的關(guān)鍵點(diǎn)。
這些功能覆蓋了從基礎(chǔ)到進(jìn)階的多個(gè)方面,非常適合希望深入學(xué)習(xí)OpenCvSharp的開發(fā)。
項(xiàng)目特點(diǎn)
易于上手:所有示例都經(jīng)過(guò)精心挑選,確保初學(xué)者可以輕松入門。
實(shí)用性高:每個(gè)示例都是針對(duì)實(shí)際應(yīng)用場(chǎng)景設(shè)計(jì),具有很高的參考價(jià)值。
開源免費(fèi):項(xiàng)目完全開源,代碼公開透明,用戶可以自由下載、使用和修改。
實(shí)時(shí)反饋:在操作過(guò)程中,用戶能夠?qū)崟r(shí)看到圖像處理的效果變化,及時(shí)調(diào)整參數(shù),這種實(shí)時(shí)反饋機(jī)制有助于用戶更好地理解算法原理和參數(shù)作用,提高學(xué)習(xí)效率。
項(xiàng)目代碼
public static Bitmap HouphLineTransferStraight(Bitmap bitmap)
{
using Mat srcLine = bitmap.ToMat();
using (Mat dst = new Mat(srcLine.Size(), MatType.CV_8UC3, Scalar.Blue))
{
// 1:邊緣檢測(cè)
Mat canyy = new Mat(srcLine.Size(), srcLine.Type());
Cv2.Canny(srcLine, canyy, 60, 200, 3, false);
/*
* HoughLinesP:使用概率霍夫變換查找二進(jìn)制圖像中的線段。
* 參數(shù):
* 1; image: 輸入圖像 (只能輸入單通道圖像)
* 2; rho: 累加器的距離分辨率(以像素為單位) 生成極坐標(biāo)時(shí)候的像素掃描步長(zhǎng)
* 3; theta: 累加器的角度分辨率(以弧度為單位)生成極坐標(biāo)時(shí)候的角度步長(zhǎng),一般取值CV_PI/180 ==1度
* 4; threshold: 累加器閾值參數(shù)。只有那些足夠的行才會(huì)返回 投票(>閾值);設(shè)置認(rèn)為幾個(gè)像素連載一起 才能被看做是直線。
* 5; minLineLength: 最小線長(zhǎng)度,設(shè)置最小線段是有幾個(gè)像素組成。
* 6;maxLineGap: 同一條線上的點(diǎn)之間連接它們的最大允許間隙。(默認(rèn)情況下是0):設(shè)置你認(rèn)為像素之間 間隔多少個(gè)間隙也能認(rèn)為是直線
* 返回結(jié)果:
* 輸出線。每條線由一個(gè)4元向量(x1, y1, x2,y2)
*/
LineSegmentPoint[] linePiont = Cv2.HoughLinesP(canyy, 1, 1, 1, 1, 10);//只能輸入單通道圖像
Scalar color = new Scalar(0, 255, 255);
for (int i = 0; i < linePiont.Count(); i++)
{
OpenCvSharp.Point p1 = linePiont[i].P1;
OpenCvSharp.Point p2 = linePiont[i].P2;
Cv2.Line(dst, p1, p2, color, 4, LineTypes.Link8);
}
return dst.ToBitmap();
}
}
public static Bitmap HouphLineTransferCurve(Bitmap bitmap)
{
using Mat src = bitmap.ToMat();
using (Mat dst = new Mat())
{
//1:因?yàn)榛舴驁A檢測(cè)對(duì)噪聲比較敏感,所以首先對(duì)圖像做一個(gè)中值濾波或高斯濾波(噪聲如果沒(méi)有可以不做)
Mat m1 = new Mat();
Cv2.MedianBlur(src, m1, 3); // ksize必須大于1且是奇數(shù)
//2:轉(zhuǎn)為灰度圖像
Mat m2 = new Mat();
Cv2.CvtColor(m1, m2, ColorConversionCodes.BGR2GRAY);
//3:霍夫圓檢測(cè):使用霍夫變換查找灰度圖像中的圓。
/*
* 參數(shù):
* 1:輸入?yún)?shù): 8位、單通道、灰度輸入圖像
* 2:實(shí)現(xiàn)方法:目前,唯一的實(shí)現(xiàn)方法是HoughCirclesMethod.Gradient
* 3: dp :累加器分辨率與圖像分辨率的反比。默認(rèn)=1
* 4:minDist: 檢測(cè)到的圓的中心之間的最小距離。(最短距離-可以分辨是兩個(gè)圓的,否則認(rèn)為是同心圓- src_gray.rows/8)
* 5:param1: 第一個(gè)方法特定的參數(shù)。[默認(rèn)值是100] canny邊緣檢測(cè)閾值低
* 6:param2: 第二個(gè)方法特定于參數(shù)。[默認(rèn)值是100] 中心點(diǎn)累加器閾值 – 候選圓心
* 7:minRadius: 最小半徑
* 8:maxRadius: 最大半徑
*
*/
CircleSegment[] cs = Cv2.HoughCircles(m2, HoughModes.Gradient, 1, 80, 70, 30, 10, 60);
src.CopyTo(dst);
// Vec3d vec = new Vec3d();
for (int i = 0; i < cs.Count(); i++)
{
//畫圓
Cv2.Circle(dst, (int)cs[i].Center.X, (int)cs[i].Center.Y, (int)cs[i].Radius, new Scalar(0, 0, 255), 2, LineTypes.AntiAlias);
//加強(qiáng)圓心顯示
Cv2.Circle(dst, (int)cs[i].Center.X, (int)cs[i].Center.Y, 3, new Scalar(0, 0, 255), 2, LineTypes.AntiAlias);
}
return dst.ToBitmap();
}
}
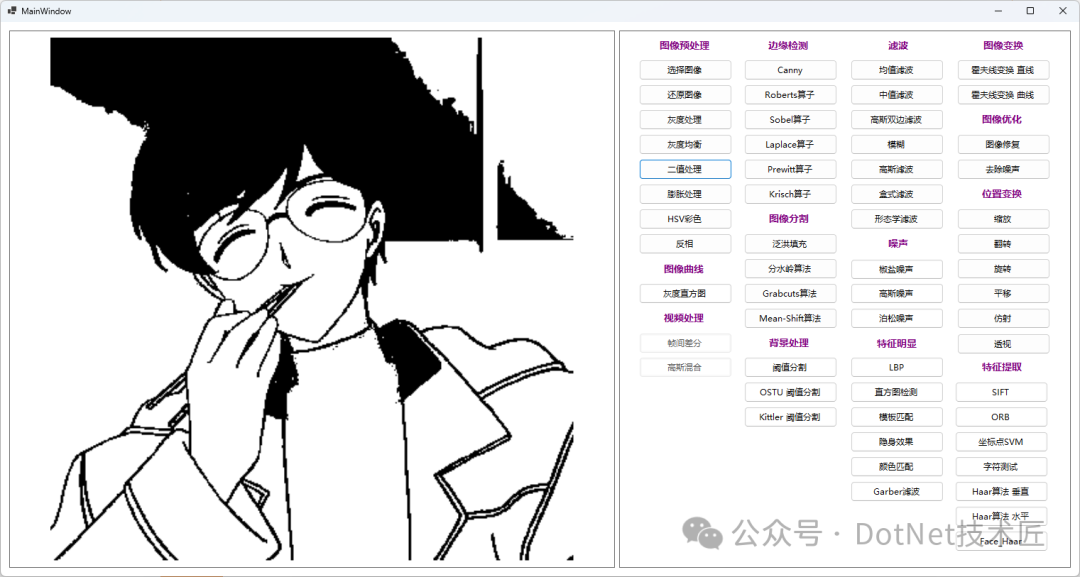
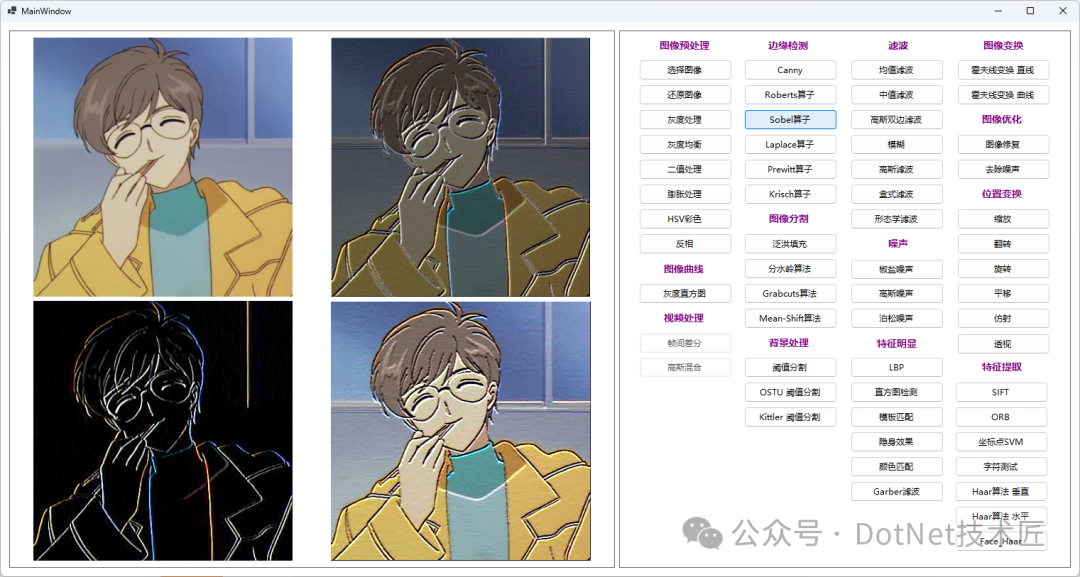
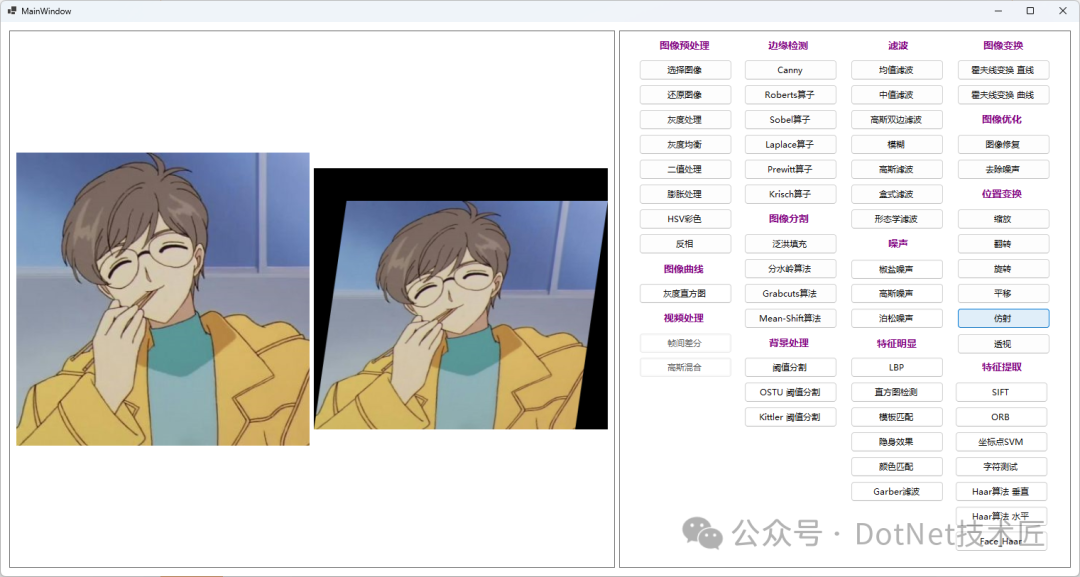
項(xiàng)目效果
GUI4OpenCV提供的代碼展示和示例參考,能夠幫助他們快速掌握一些復(fù)雜算法的實(shí)現(xiàn)方式,提高開發(fā)效率。
項(xiàng)目源碼
通過(guò)以下鏈接訪問(wèn)項(xiàng)目的完整源碼:
Gitee:https://gitee.com/alianyone/gui-4-opencv
總結(jié)
GUI4OpenCV是一個(gè)非常實(shí)用的OpenCvSharp學(xué)習(xí)工具,它以圖形化的方式為大家提供了豐富的學(xué)習(xí)示例和便捷的操作體驗(yàn)。
通過(guò)這個(gè)項(xiàng)目,可以更加輕松地入門OpenCvSharp,掌握?qǐng)D像處理的基本技能。雖然目前項(xiàng)目中部分實(shí)現(xiàn)可能存在一些小問(wèn)題,但這并不影響它作為一個(gè)優(yōu)秀學(xué)習(xí)工具的價(jià)值。希望更多的開發(fā)能夠關(guān)注和使用GUI4OpenCV,同時(shí)也期待大家積極參與項(xiàng)目的改進(jìn)和完善,共同推動(dòng)OpenCvSharp在.NET領(lǐng)域的應(yīng)用和發(fā)展。
關(guān)鍵詞
#OpenCV、#OpenCvSharp、#圖像處理、C#、#開源項(xiàng)目、#邊緣檢測(cè)、#顏色空間轉(zhuǎn)換、#特征點(diǎn)檢測(cè)、#WinForm
閱讀原文:原文鏈接
該文章在 2025/7/29 12:30:40 編輯過(guò)
晴ERP是一款針對(duì)中小制造業(yè)的專業(yè)生產(chǎn)管理軟件系統(tǒng),系統(tǒng)成熟度和易用性得到了國(guó)內(nèi)大量中小企業(yè)的青睞。")
晴PMS碼頭管理系統(tǒng)主要針對(duì)港口碼頭集裝箱與散貨日常運(yùn)作、調(diào)度、堆場(chǎng)、車隊(duì)、財(cái)務(wù)費(fèi)用、相關(guān)報(bào)表等業(yè)務(wù)管理,結(jié)合碼頭的業(yè)務(wù)特點(diǎn),圍繞調(diào)度、堆場(chǎng)作業(yè)而開發(fā)的。集技術(shù)的先進(jìn)性、管理的有效性于一體,是物流碼頭及其他港口類企業(yè)的高效ERP管理信息系統(tǒng)。")
晴WMS倉(cāng)儲(chǔ)管理系統(tǒng)提供了貨物產(chǎn)品管理,銷售管理,采購(gòu)管理,倉(cāng)儲(chǔ)管理,倉(cāng)庫(kù)管理,保質(zhì)期管理,貨位管理,庫(kù)位管理,生產(chǎn)管理,WMS管理系統(tǒng),標(biāo)簽打印,條形碼,二維碼管理,批號(hào)管理軟件。")
晴免費(fèi)OA是一款軟件和通用服務(wù)都免費(fèi),不限功能、不限時(shí)間、不限用戶的免費(fèi)OA協(xié)同辦公管理系統(tǒng)。")


 400 186 1886
400 186 1886
晴公司官網(wǎng)")